近日,我所自行研制的多功能水下智能检查机器人通过了专家组鉴定,专家组认为该机器人各项性能指标均达到预期目标,在水下动密封技术、水下姿态检测、多传感器信息融合、图像识别、水下测量等关键技术上达到了国内领先水平。
水下智能检查机器人是在中科院“西部之光”资金及所专项资金的大力支持下,由我所四室科研团队历时2年完成。与其他水下智能机器人不同的是,光电所研制的智能检查机器人可以在水下高辐射环境中,从事核电水下探测、堤坝检查、管道检测、异物水下打捞等工作。目前,我所四室已先后为秦山核电有限公司、中国核动力设计研究院、广东核电集团等多家单位提供了定制设备,产品应用后受到了用户的一致好评。该智能机器人与光电所四室先期研发的反应堆压力容器螺栓孔自动检查机器人、CRDM钩爪检查机器人、水下异物打捞机器人、排爆机器人等特种机器人形成的系列产品也被核电用户评为首选产品。
水下智能检查机器人的成功研制填补了国内核电智能机器人的空白,也为我所承担的2013年国家973计划“核电站紧急救灾机器人的基础科学问题”积累了丰富的前期研发经验。

水下智能检查机器人
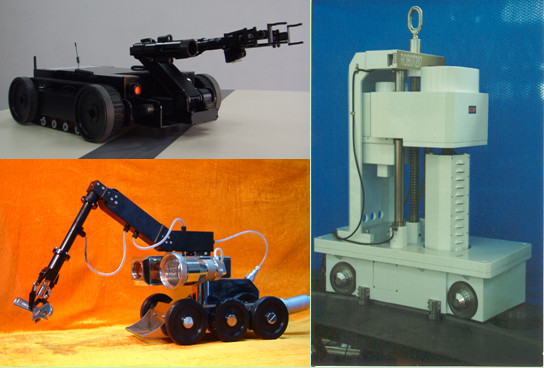
产品化的机器人检查设备


